Pneumatic Connections
To fully control a soft robot it needs to be able to connect to high pressure, low pressure and atmospheric pressure independently. The diagrams below explain an easy way to configure the pumps and valves to achieve this. Each Programmable-Air board contains all of these elements.

The solid lines represent air tubes. There are three valves below, all closed. From top to bottom, the inputs of the valves are connected to high pressure, low pressure and atmospheric pressure. The outputs of all valves are connected to each other and to a pressure sensor as well as the soft robot.
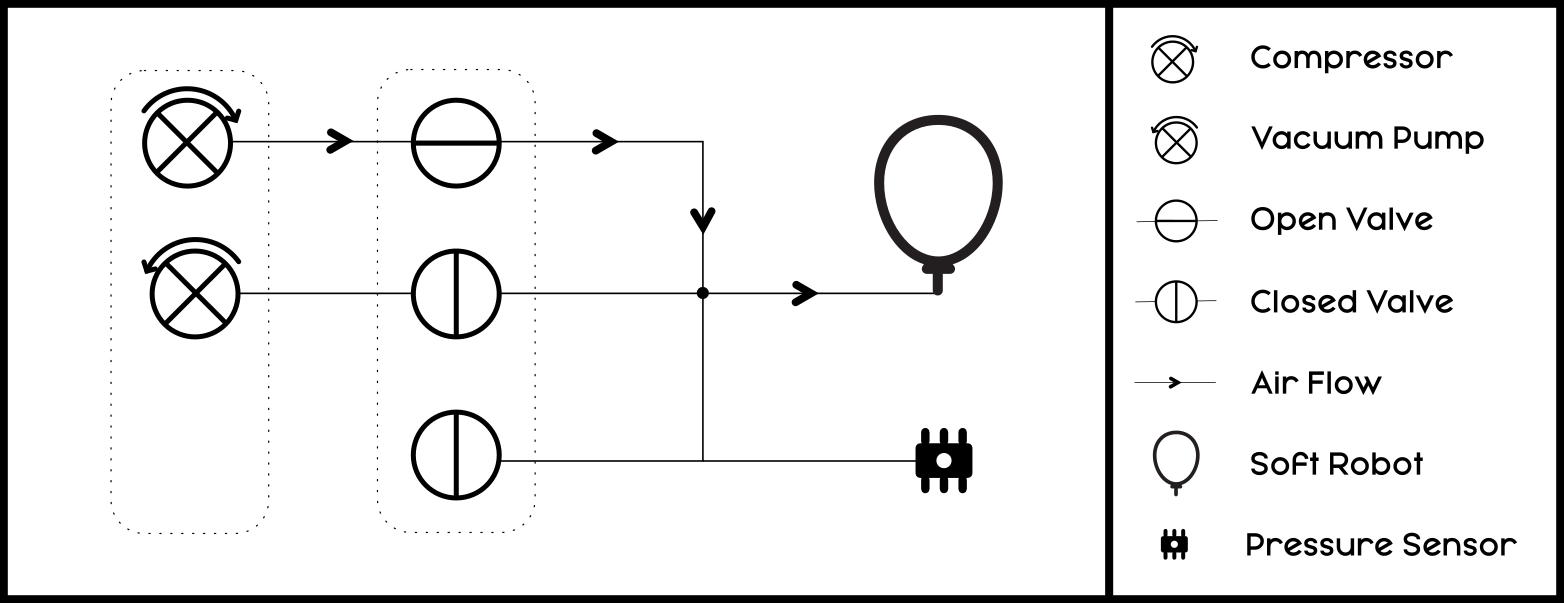
The valve on top is switched on, blowing air into the soft robot. The pressure sensor reads an increase in pressure.

The valve in the middle is switched on, sucking air out of the soft robot. The pressure sensor reads a decrease in pressure.
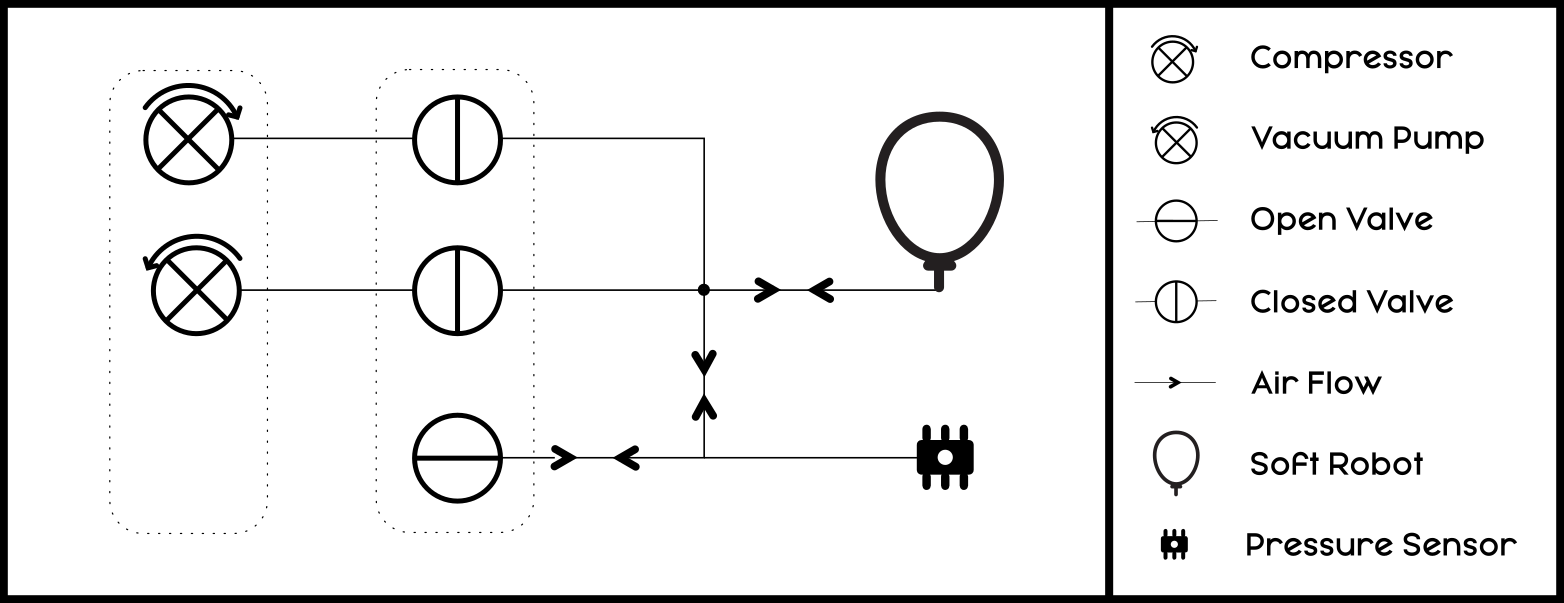
The valve at the bottom is switched on, exchanging air with the atmosphere. The pressure sensor eventually stabilizes to read atmospheric pressure.